
Pauta
Limpeza da sala - retiramos o material excedente da sala e doamos a Dona Catarina.
Equipe Pequenos Cientistas - Sumo
Revisão do projeto TITAN I:
- O nome do projeto será mudado, não será mais TITAN I.
- O chassi iria ser feito com motores de passo mas, por problemas com a montagem de ponte H com transistor (o último teste fechou curto e queimou a bateria), não usaremos por enquanto pois não conseguimos controlá-los. Substituiremos as pontes de transistor (TIP120/127) por L298N e, os motores de passo, por servo motores de parabólica retirados do projeto "Cilene", vencedor do 6º Grande Desafio.
- A revisão na estrutura, conforme sugestão do Daniel, incluirá a instalação de uma rampa frontal para proteção do Robô, conforme esquema abaixo.
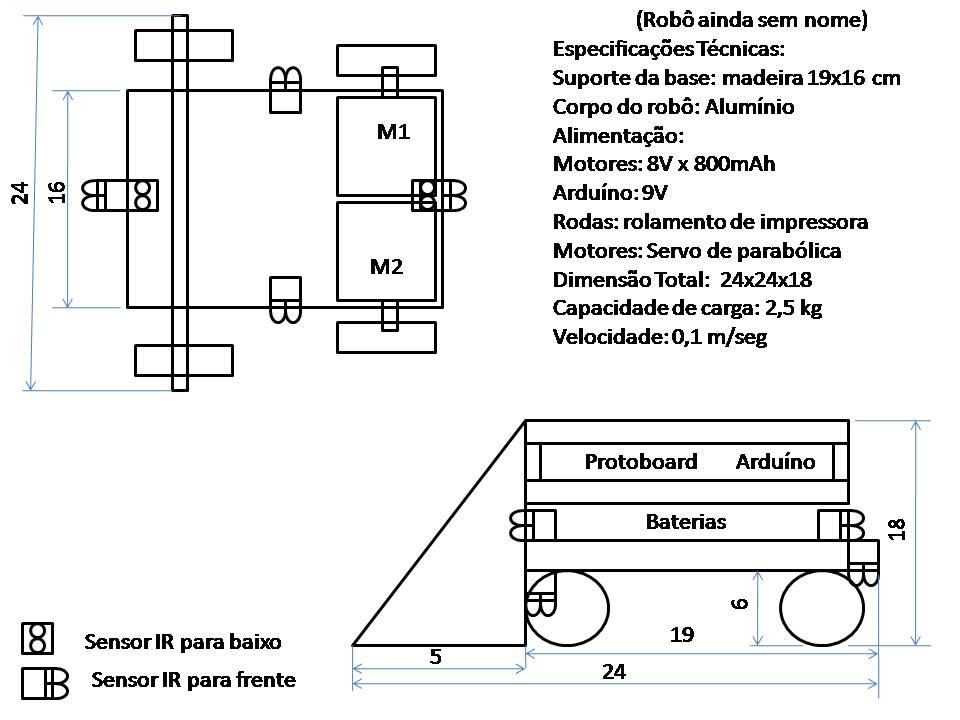
- Houve mudanças no tamanho do robô porque estávamos com problemas nas rodas, que foram trocadas por rolamentos de impressora, tanto na dianteira quanto na traseira. Para facilitar utilizamos como eixo o próprio eixo dos rolamentos da impressora, que funcionou bem. Para melhorar o deslizamento da roda dianteira, usamos rolamentos de borracha de outro modelo de impressora e, ao lado dos rolamentos, vamos colocar arruelas de metal. Para conectar as rodas aos servo motores, usamos o mesmo esquema do "Cilene" e, no lugar de cantoneira de alumínio, usamos placas velhas de circuito impresso, uma de cada lado da roda. O resultado foi excelente, precisando apenas trocar os parafusos de cabeça redonda por parafusos de cabeça chata. Precisaremos também de uma chave de boca 6mm para apertar as porcas do eixo e, brocas de madeira 6mm.
- Nos testes de peso, essa nova estrutura suportou 2,5 kg. No teste de velocidade, percorreu 30cm em 3 segundos, aproximadamente, o que resulta numa velocidade de 0,1 m/seg, resultado de velocidade semelhante ao resultado do campeão da Robocore, categoria seguidor de linha, em 2011.
- Ficou decidido que, seria instalado um peso na dianteira do robô, dentro dos limites das regras do Torneio (estipula peso máximo de 1,5 kg) com intuito de proteger contra os oponentes.
- Usaremos 2 andares para instalação das baterias e do Arduino, conforme desenho acima.
- Por conta do uso dos servo motores, não sobrou espaço na parte traseira inferior para instalação do sensor IR, portanto a posição do sensor vai ser alterada conforme o esquema acima.
Lista de Compras para o chassi:
8 parafusos de madeira 6mm
10 parafusos de 6mm cabeça chata
1 chave de boca 6mm fina
Equipe Fenix
Categoria: Labirinto de Linhas
- Usaremos o chassi de carrinho velho de controle remoto como chassi, foi feita a limpeza e manutenção do mesmo.
- Instalou-se um motor que era usado no guindaste, com 2 cabos, no braço dianteiro do chassi, para fazer o carro virar.
Equipe Orion
Categoria: Sumô Large
- Feita a inscrição no torneio, com alteração da categoria pois o tamanho do chassi foi mudado.
- Reunião do Arduino: comando Blink, IF e Calibração de Sensores (IR)
- Uma das rodas de rolamento de impressora está com a equipe para adaptação ao chassi
- Discutimos a opção de instalação de alimentação de emergência, usando transistores NPN e PNP, que permitiria os motores, por alguns instantes, alterarem a tensão de 6V para 9V, aumentando a velocidade e potência do motor.
- Instalação do 3º motor no braço traseiro, para fazer o robô virar
Os alunos Marcelo e Paulo levaram o Arduino para treinar a programação no fim de semana.
A prof. Andreia vai doar R$ 50,00 para compra do material que falta para construção do robô:
10 resistores de 220 ohm
10 resistores de 10 Kohm
8 TIL 32 - receptor de IR
8 TIL 78 - emissor de IR
2 L298N
16 diodos 400x
1 suporte de bateria com pino DB9 para ligar no Arduino
2 soquetes de 16 pinos
2 soquetes de 40 pinos - ligação dos fios
Há uma proposta de adiantamento de verba feita pela coordenadora Vani que vai conversar com a Diretora da Escola Elza. Aguardamos segunda para confirmação mas, tornaria possível e viável a participação de todas as equipes, inclusive na categoria Sumô MMA.
- O Paulo ficou de levantar verba para a compra de mais um Arduino no fim de semana, o que permitira a participação no MMA.
Análise de procedimentos da Equipe Orion
(AINDA ESTÁ INCOMPLETO)
M1 motor direito: 5 – FRENTE, 6 – RÉ
M2 motor esquerdo: 7- FRENTE, 8 – RÉ
M3 motor do eixo: 10
EXTRA: 9
S1 – sensor de linha dianteiro
S2 - sensor de linha
traseiro
S3 – sensor de objeto dianteiro
S4 – sensor de objeto traseiro
S5 – sensor de objeto direito
S6 – sensor de objeto esquerdo
|
|
|
Sentido
|
|
|
|
|
Sensor
|
sinal
|
M1
|
M2
|
Reação
|
Pinos HIGH
|
|
S1
|
+
|
RÉ
|
RÉ
|
↓
|
6,8
|
|
S2
|
+
|
FRENTE
|
FRENTE
|
↑
|
5,7
|
|
S3
|
+
|
FRENTE
|
FRENTE
|
↑
|
5,7
|
|
S4
|
+
|
RÉ
|
FRENTE
|
→
|
6,7
|
|
S5
|
+
|
FRENTE
|
RÉ
|
←
|
5,8
|
|
S6
|
+
|
RÉ
|
FRENTE
|
→
|
6,7
|
|
S1 + S3
|
+
|
FRENTE
|
FRENTE
|
↑
|
5,7
|
|
S1 + S4
|
+
|
RÉ
|
FRENTE
|
→↑
|
|
|
S2 + S3
|
+
|
|
|
|
|
|
S2 + S4
|
+
|
|
|
|
|
|
TODOS
|
-
|
|
|
|
|
Nenhum comentário:
Postar um comentário