A revista Mecatrônica Fácil publicou a alguns anos um trabalho do Newton C. Braga sobre os Veículos Mecatrônicos - VM, apresentando 3 modelos: a hélice, com polias feitas de latinha e com engrenagens. Todos estes modelos eram acionados por sensores de luz com LDR e transistor e, recentemente, um controlado por laser point.
Uma ex-aluna do projeto, a Rayane, que hoje está na ETEC de Campo Limpo Paulista, nos procurou esta semana porque, a pedido do seu professor de Física, precisava desenvolver um VM, sem acionamento luminoso, um carro de Newton, que funcionasse por ação e reação e, estava sem material. Um dos seus pedidos é que o veículo fosse muito rápido, pois ela pretende ganhar a competição.
Ontem, dia 26/11, ela visitou sua antiga escola (EE Frei Dagoberto Romag) e veio buscar material e auxílio técnico em sua empreitada. Bom, o trabalho segue no vídeo e imagem abaixo e, como ela já foi do grupo de Química do projeto, o Quimera, que participou do mapeamento dos mananciais da região e seu estado de poluição, resolveu lembrar dos velhos tempos e batizou o carrinho de "Quimera" - "figura mística caracterizada por uma aparência híbrida de dois ou mais animais e a capacidade de lançar fogo pelas narinas, sendo portanto, uma fera ou besta mitológica...
Cabeça e corpo de leão, com duas cabeças anexas, uma de cabra e outra deserpente;
Cabeça e corpo de leão, com duas cabeças anexas, uma de cabra e outra dedragão;
16/12/2012 - Projeto com Arduino (Simulino) para controle de carga de bateria
Este controlador de tensão tem como objetivo emitir um sinal sonoro quando a bateria estiver no limite de funcionamento - 6 volts de carga - isso vai evitar problemas como tivemos anteriormente da bateria acabar e não ficarmos sabendo.O potenciômetro simula a descarga da bateria.
Agradecemos pelo auxílio Robson da equipe do site: www.earduino.com.br.e a equipe que desenvolveu o simulino.
/* CONTROLE DE TENSÃO - ALARME DE DESCARGA DE BATERIAS USANDO ARDUNO
Projeto a ser uilizado em robôs de combate e alertar quando a bateria está acabando
*/
void setup (){
pinMode (0, INPUT);
Serial.begin (9600);
pinMode (6, OUTPUT);
}
Usando relés e 555
O controle de tensão é feito por resistores e, quando atinge a tensão de 6V, ativa o relé que liga o 555, no estado monoastável, produzindo frequências em torno de 30Hz, fazendo o led piscar. Pode ser aplicado num buzzer e produzir sons, a escolha do led foi pela questão visual. O potenciômetro no 555 permite inclusive regular a frequência e, o potenciômetro na bateria, simular a descarga da mesma. O objetivo deste projeto é o controle de carga de uma bateria que alimenta nossos robôs.
28/11/2012 - Teste do projeto de controle de carga de bateria em protoboard.
Neste teste, em protoboard, usamos um Pot para simular a descarga da bateria, conforme projeto no Proteus. O resultado foi satisfatório.
Teste 1 - Resistores de 1k ohm
Teste 2 - Resistores de 4k7 ohm
Teste com bateria LiPO com Potenciômetro
Avaliação com Multímetro
Resultado:
Primeiro LED - 6V
Segundo LED - 4V
Terceiro LED - 1V
Resistor Final - 0V
PS: Esta bateria já tinha sido usada durante a apresentação no Instituto Federal de Educação por cerca de 2 horas e na Oficina na Escola Adventista por cerca de 30 minutos.
16/11/2012 - Projeto
Conforme colocamos em outros posts, baterias de aeromodelo LiPO não podem descarregar totalmente e, para evitar que isso aconteça, é preciso construir um medidor de carga da bateria. Este projeto, feito usando Proteus, simula o funcionamento de um controle de carga de bateria planejado para 11,1 V.
Os resistores foram ligados em série e, a base do 548 conectado entre o par de resistor 10k e 50k ohm. O potenciômetro 10k foi usado apenas para simular a redução da tensão na bateria.
Versão 2
Materiais
4 Resistores de 4k7 ohm
3 resistores de 520 ohm
3 bc548
3 led´s - 1 verde, 1 amarelo e 1 vermelho
Estes componentes foram escolhidos porque é o que temos em estoque atualmente.
Após todos os testes chegamos a solução: 9V - verde, 6V - amarelo, 3V - vermelho. Os materiais:
Recebemos a seguinte mensagem do Arduino quando enviamos um sketch:
avrdude: stk500_getsync(): not in sync: resp=0x30
Uma das soluções foi encontradas foi desligar todas as ligações do Arduino e gravar o sketch sem o Arduino ligado na porta USB.
Outra opção é resetar o Arduino quando estiver gravando.
A terceira opção encontrei na internet no site do Windows: Se você inserir e remover um dispositivo USB rápida e repetidamente, a porta USB poderá parar de responder. Quando a porta estiver nesse estado, ela não reconhecerá os dispositivos USB e o dispositivo não funcionará. Ou seja, se você ficar colocando e tirando o Arduino ou enviando o Sketch várias vezes, você pode sobrecarregar a saída e travar o Arduino. Neste site: http://www.instructables.com/id/A-solution-to-avrdude-stk500getsync-not-in-syn/ apareceu outra solução que está em inglês e eu traduzi (google tradutor kkkkk). Primeiro - Teste o pino 13 , se ele acender um led é porque o bootloader está funcionando. Se não, voc~e deve seguir este tutorial da Sparkfun para corrigir o problema: http://www.sparkfun.com/tutorials/247. Tente reinstalar o driver do Arduino UNO novamente... Tentei isso mas não deu certo, mas em muitos casos resolve. Recebi a mensagem de que o drive do Arduino não é 32bits... Última tentativa - baixe a versão mais atualizada do IDE Arduino: http://arduino.googlecode.com/files/arduino-1.0.2-windows.zip
Testes da proteção da esteira, feita com acrílico. A ideia era proteger a esteira para que não escapasse do eixo e, até certo ponto, funcionou. O problema foi o parafuso que trava nos discos o que levou o Marcelo a sugerir a construção de uma proteção que vá de roda a roda e a troca do parafuso de cabeça redonda por um de cabeça chata, cortado e limado.
Vídeo do teste
17/02/2013
Placa de circuito impresso com 3 l298n
Esta placa de circuito foi projetada para 3 motores de passo usando o L298n e um regulador de voltagem (5V), o que elimina o uso do Arduino como fonte de alimentação, evitando o acidente causado pelo Prof. Alan, conforme esquema abaixo:
Link para baixar os pdf´s para impressão:
https://skydrive.live.com/redir?resid=AC8ECA0DCFBBC517!398&authkey=!AAqm8K3wx1qMa8Q
Na tentativa de melhorar o robô Onix, fizemos umas rodas de acrílico para colocar sobre as rodas e evitar que a corrente escape, como anda acontecendo. Fotos abaixo:
Outra ideia surgiu hoje: criar uma correia de borracha e sapatas de pneu de carro, evitando assim escorregar.
Novas fotos do Onix - proteção do sensor:
13/02/2013
Bom começamos mal - queimei o regulador de voltagem do Arduino do Onix, ou seja, o pino DB09 não funciona mais - não dá para ligar o robô de forma autônoma, só na porta USB - ele ficará conectado ao computador... Parabéns prof. Alan...
Par piorar tentamos configurar o Onix para seguidor de linhas mas infelizmente não deu certo - a esteira escorrega - problema antigo, já detectado na configuração lutador de sumô. Realizamos testes de todo tipo:
- Calibração dos sensores para preto.
- Calibração dos sensores para preto/branco.
- Uso do analogWrite - comando que permite o PWM com várias intensidades (aliás quando usamos o PWM até 200 o motor faz um chiado esquisito).
- Inserimos um delay no tempo de motor ligado e um comando desligar o motor, similar ao PWM, mas com intervalo de décimo de segundo, que apresentou um bom resultado. O problema é que o robô não conseguia fazer curvas de ângulos agudos porque continua deslizando.
Resumindo - a velocidade decaiu bruscamente e mesmo assim o robô não conseguiu fazer curvas.
Voltamos ao planejamento.
02/2013
O robô ONIX recebeu uma nova atualização - na frente, para proteger o sensor de ultrassom, foi instalado um suporte de alumínio e a esteira foi lubrificada, junto com os eixos. Nesta data testamos também a instalação de uma correia de borracha colada com araldite para aumentar a tração. Houve um real aumento de tração mas o motor falhava chegando a desgastar a borracha da roda.
Utilizamos também neste teste uma fonte de 20V/3.25A do notebook para alimentar o robô. Esta fonte trabalha no limite do Arduino, que respondeu bem (sem aquecimento) e o robô ficou mais rápido do que estava. Mas o torque ainda foi inferior ao que precisamos - colocamos o Orion 2.0 de lado e o Onix não conseguiu empurrá-lo.
Sistema de proteção do sensor do ONIX
Futuras correções a serem feitas:
- Melhorar a fixação dos motores com o uso de parafusos
- Instalar sapatas de borracha na esteira
- Instalar placa de pci com l298n e suporte para Arduino
- Programação para seguidor de linha e resgate de alto risco
- Proteções nas laterais da esteira para evitar que desencaixe
21/12/2012
Nova placa de circuito impresso para o ONIX usando o L298n e diodos de proteção, com Arduino já instalado na placa.
https://skydrive.live.com/redir?resid=AC8ECA0DCFBBC517!355&authkey=!ANeZQdphKUdh9nI
20/12/2012
FINALIZADO - Hoje o Onix esta pronto para o sumô de robôs.
Realizamos os seguintes ajustes:
- Troca do suporte do sensor de ultrassom que não estava funcionando corretamente e colocação numa posição melhor - mais alto.
- Troca dos parafusos com cabeça redonda por cabeça chata evitando que as rodas travem no chassi.
- Colocação de fita adesiva no eixo do motor melhorando o contato com a roda e diminuindo o desgaste do eixo de plástico, o que melhorou muito a tração.
- Colocação de arruelas entre as rodas e o chassi e entre as rodas e a bucha de fixação das rodas diminuindo o atrito destas com o resto do chassi.
- Calibração dos sensores de IR - QR1113 em diversos ambientes.
- Troca do Arduino que estava no robô pois este não era reconhecido pela porta USB do computador, passamos a usar um Arduino Uno Rev. 3.
- Instalação de um suporte para proteger o sensor de ultrassom contra impactos e melhorando sua eficiência: detectamos que a curta distância o sensor ficava cego.
- Ajuste da programação do robô quando encontra a linha preta: primeiro usamos uma ré de 3 segundos, depois uma de 1 segundo e finalmente o ideal foi uma ré de 0,5 segundos.
- Instalação de um soquete DB09 fêmea para ligar a fonte de alimentação 12V/1A e luzes para decoração do chassi.
Vídeos dos testes:
Correção das esteiras e instalação do ultrassom
Dificuldade em localizar objetos baixos
Ajustes do tempo de ré - primeiro 3 seg, depois 1 seg e finalmente 0,5seg.
Ajuste final instalando as arruelas na esteira e calibrando os sensores.
Testes complementares, os últimos ajustes:
Melhorias ainda necessárias:
- Instalar um suporte na frente do robô para evitar impactos sobre o sensor de ultrassom.
- Abaixar a altura do sensor de ultrassom melhorando a identificação de objetos baixos.
- Instalação de uma proteção entre o chassi e as rodas funcionando como guia para a esteira.
- Instalação da esteira de borracha para melhorar a tração.
- Instalação das placas PCI de l298n para controlar os motores e conexões elétricas.
Próxima fase:
Seguidor de linha com detecção e desvio de objetos - neste caso não haverá mudanças no chassi, apenas a instalação de um suporte para conduzir a vítima e mudanças de programação.
16/12/2012
Placa de circuito impresso
Este link permite a impressão da placa de circuito impresso do ONIX por meio de método térmico:
https://skydrive.live.com/redir?resid=AC8ECA0DCFBBC517!351&authkey=!AP-6bA-t6-q4xVo
Feito no Fritzing.
Obs: falha na altura do sensor direito causada pela inclinação do chassi pode causar leitura errada
sensor de ultrassom: faixa de detecção ótima: 70 cm
Configuração - pinos digitais
3,5 - frente
2,4 - trás
3 - curva aberta a direita
5 - curva aberta a esquerda
3,4 - curva fechada a direita
2,5 - curva fechada a esquerda
Vantagem mecânica
Diâmetro da roda: 5,3 cm
Diâmetro do eixo: 1,2 cm
Comprimento da esteira: 43,5 cm
VM = 5:1
Velocidade: 0,4 metros por segundo
O projeto recebeu finalmente seu nome: ONIX. Pesquisando na internet encontrei a seguinte referência:
Os indianos acreditavam que o Ónix os protegia de encantamentos e magia negra. Os gregos tinham a convicção de que esta pedra tinha grande poder em assuntos amorosos. Os romanos tinham-na com como pedra de protecção. Na verdade, o Ónix era das pedras mais importantes na Antiguidade. Actualmente, crê-se que estabelece o equilíbrio entre o corpo e a alma, ajuda na concentração, a estabelecer limites, disciplina e auto-controlo. Protege contra magia e traz harmonia em momentos difícieis.
Ônix é uma variedade de calcedônia, de cor negra. Calcedônia é um quartzo, mais comum na cor azulada, acinzentada ou branca. O nome ônix vem do grego onux, que quer dizer unhas dos dedos das mãos.Refere-se as unhas de Vênus, cortadas por uma flecha de Cupido, na mitologia grega. Suas unhas teriam caído na areia e virado pedras negras.
Outras fontes indicam a mesma coisa sobre esta pedra. Um detalhe - a pedra mais desejada é negra, futura cor do robô.
Agradecemos a Prof. Renata pelo nome e por toda ajuda.
Mais informações: http://www.lendaviva.com.br/site/onix.html
14/12/2012
Fotos do projeto
Estávamos testando o 20x20, no primeiro teste sem gravar funcionou muito bem, ele localizou a caneca e deu um jeito nela... Ai fomos gravar, o robô caiu de 1 metro de altura... saiu quase inteiro - os pinos do Arduino entortaram e o fio de um dos motores soltou. Bom, alguns minutos antes, tínhamos notado que um dos sensores estava no limite de distância de calibração e, segundos antes, ele funcionou, quem imaginaria que o sensor falharia? Pelo menos não aconteceu nada grave.
Vídeo do acidente
Ainda tentamos testar depois mas não tínhamos visto que o fio do motor tinha sido cortado... por isso ele não estava funcionando, rodava igual barata tonta. Mas ainda está firme e forte.
13/12/2012
Teste autônomo do robô
Usamos protoboards para simular o 2º andar do robô, e bateria de 11V para alimentar o Arduino e deixamos o robô percorrer um espaço no corredor da escola e uma mesa.
Faltou calibrar o sensor de IR, porque não tínhamos computador para fazer o teste e instalar o sensor de ultrassom.
O peso atual do robô é 1410 g, quase no limite do Torneio Juvenil de Robótica que delimita o 20x20 em 1500g.
Ele ainda sai um pouco para a esquerda mas achamos que o problema é que a esteira escorrega.
11/12/2012
Realizamos o teste prático, instalando a protoboard com o L293c no chassi 20x20 e, conectando a bateria LiPo 11V/1A e os motores. O teste se mostrou extremamente positivo, com o robô se movimentando seguindo linha por toda a mesa e, quando encontrou região escura da mesa ou o sensor foi levantado, os motores alteraram seu movimento, corrigindo seu curso. Apresentou boa capacidade de seguir linhas, mantendo-se em linha reta e boa velocidade, apresentando o resultado de tração melhor que os primeiros testes.
Teste com o chassi levantado - reação o mudança da condição do sensor.
Teste sobre a mesa
Ajustes necessários
1- Ainda está travando uma das esteiras, fato causado pela provável distância do eixo do motor a roda. Uma solução seria produzir um furo com broca maior para melhorar.
2- Para aumentar a tração, colocar uma correia de borracha sobre a esteira (43cm).
3- Criar um suporte de alumínio para o Arduino e o L293c que posteriormente será substituído por placas de circuito impresso.
4- Abrir 2 furos para sensores de IR (QR1113) na frente do robô, deixando o furo de trás para usar o robô em sumô.
5- Cortar as barras de ferro, colocar arruelas, cortar as borrachas e trocar os parafusos redondos por parafusos com cabeça chata.
6- Instalar o suporte de baterias.
7- Passar uma correia de borracha sobre o eixo de plástico do motor.
8- Instalar as proteções dianteira e traseira do chassi e criar o suporte para o acrílico escuro - escudo, protegendo as rodas e a esteira.
9- Instalar o sensor de ultrassom e configurar.
10 - Preparar o robô para OBR - instalar um suporte de presilha.
Teste do l293c controlado por Arduino com led´s
Configuração
input - fio vermelho
output - fio laranja
enable - fio azul
Vs1 e 2 - fio verde
Vss - lógica 5V - Branco ligado no Arduino
GND/Terra - Preto
Branco/Laranja grande - fio que vai na bateria (+ e -)
Amarelo longo - Ligação com o Arduino (+ e -)
Programa Utilizado
/*Progama de teste do robô 20x20 de esteiras*/
int m1d = 2;
int m1e = 3;
int m2d = 4;
int m2e = 5;
int s1 = A0;
void loop(){
//Leitura do sensor 1
//Retorna o valor QRE1113
pinMode( ir, OUTPUT );
digitalWrite( ir, HIGH );
delayMicroseconds(10);
pinMode( ir, INPUT );
long tempo = micros();
//o tempo medido HIGH, que acaba 3 segundos depois
while (digitalRead(ir) == HIGH && micros() - tempo < 3000);
int dif = micros() - tempo;
//Leitura do sensor 2
//Retorna o valor QRE1113
pinMode( ir2, OUTPUT );
digitalWrite( ir2, HIGH );
delayMicroseconds(10);
pinMode( ir2, INPUT );
long tempo2 = micros();
//o tempo medido HIGH, que acaba 3 segundos depois
while (digitalRead(ir2) == HIGH && micros() - tempo2 < 3000);
int dif2 = micros() - tempo2;
Teste com 2 sensores IR - Seguidor de linha/Robô de combate
10/12/2012 - Site para consulta
Dados os problemas com o Hermes e com o 20x20 mando mais um link para consulta:
http://www.rctankcombat.com/articles/track-systems/
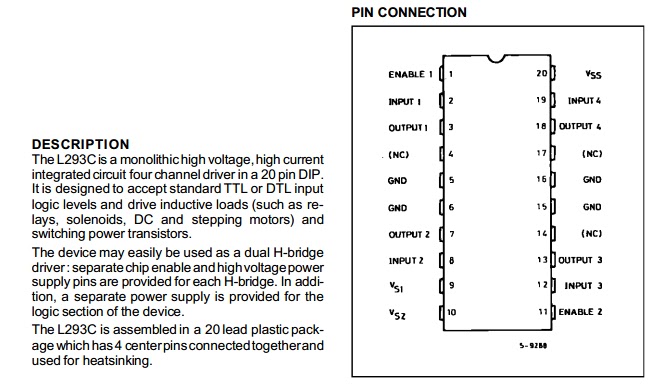
L293C - Pinagem
07/12/2012 - Primeira ideia para solução do problema de esteiras
Colocar uma correia de borracha sobre a esteira com alguns mm, cerca de 2 mm, mais curta que a corrente, que funcionaria eliminando o problema de escorregar.
06/12/2012 - Primeiro teste do chassi de esteiras
Teste preliminar usando uma fonte de 9V/200mA. A esteira escorregava e falta alguns ajuestes. Mas funciona.
Segundo teste - usamos uma fonte 12V/1,4 A. A esteira funcionou, o robô vira para os lados e tem boa tração. Testamos com uma bateria LiPo 11V/1A e o resultado foi similar. Falta a parte eletrônica e alguns ajustes e cortes para melhorar o peso e evitar que a esteira escape. Mas estamos muito otimistas com o projeto.
29/11/2012 - Primeiras fotos do Projeto
3 Equipes farão projetos baseados neste tipo de chassi -2 no Elza (Fundamental e Médio) e 1 no Frei.
Fotos da Equipe do Ensino Médio, que pretende fazer o modelo com esteiras:
17/11/2012
Usando como base a estrutura do ROBOCOM, da Revista Mecatrônica Fácil nº 40 podemos desensvolver nosso robô de combate usando motores de escova e um sistema de tração direta conforme as imagens abaixo:
Para tanto, podemos medir a força transmitida pelo motor a roda, medindo a potência do motor e usando a fórmula abaixo:
15/11/2012
Este projeto me inspirou para preparar nosso novo robô de sumô 20x20 categoria fundamental:
http://www.societyofrobots.com/robot_sumo.shtml
Penso em usar motores de escovas, por sua velocidade, dado que este robô não tem objetivo de força bruta e, usar um par de sensores IR e ultrassom para detecção do oponente. Dois sensores de linha para detectar linha preta do fim da área e o Arduino controlando tudo. Neste projeto, um servo de posição para controlar o giro do sensor e localizar o objeto.
As rodas, adaptadas de roletes de impressora HP (sistema tradicional).
08/12/2012
Artigo que será a base do projeto:
http://www.nitt.edu/portal/rmi/home/projects/ultrasonic_sensors/
Fizemos o primeiro teste de sensor de ultrassom. Usamos um buzzer comum e um microfone retirado do Arduino, usando o comando tone - tone (6, 30000); - e, no microfone um resistor de 1k e de 10k ohm e o resultado foi negativo, não funcionou.
5/12/2012 - Planejamento do trabalho
Fase 1- Usando o Arduino para gerar 40kHz de frequência, buzzer e um microfone ligado a porta analógica
Fase 2- Adicionando a fase 1 um amplificador ou filtro de frequências (microfone)
Fase 3 - Adicionando a fase 2, no amplificador ou filtro, um RS232 para converter o sinal
Fase 4 - Substituindo o Arduino por um 555 gerando pulsos de 40kHz.
Fase 5 Montagem em placa e teste final
Perguntas para a introdução
O que é um sensor?
O que é frequência? O que é som? Quais são as frequências do ultrassom?
Quais são as aplicações de sensores de ultrassom?
Resumo do projeto (o que vamos fazer)
15/11/2012
Estamos planejando fabricar nosso próprio sensor de ultrassom e como referência básica usamos este link:
Os primeiros testes foram feitos no Simulino, usando este sketch mas, ainda não obtivemos resultado, até porque nós não sabemos como criar uma simulação de reflexão.
/* Código adaptado do sensor PING */
// configura os pinos de sáida
const int emissor = 7;
const int receptor = 8;
void loop()
{
// establish variables for duration of the ping,
// and the distance result in inches and centimeters:
long duration, cm;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
digitalWrite(emissor, LOW);
delayMicroseconds(2);
digitalWrite(emissor, HIGH);
delayMicroseconds(5);
digitalWrite(emissor, LOW);
//o receptor faz a leitura do estado do pino e se retorna HIGH ele informa
duration = pulseIn(receptor, HIGH);
cm = duration/58;//converte o valor do sensor1 em cm
Trabalhamos na montagem do primeiro TCRT5000 conforme este post e o resultado ainda foi 2 cm para detecção de linha branca, conforme este post do nosso blog: http://www.cienciaemconsciencia.blogspot.com.br/2013/02/primeiro-tcrt-5000-sensor-de-linha.html
Abaixo o esquema da placa de sensor com amplificador ótico e controle de frequência:
Link para impressão da placa para elaboração por método térmico:
Testes com TCRT 5000 e TITAN usando dois emissores de IR e bc558 como amplificador
Estes testes comprovaram que, em ambos os sensores, o resultado de distância melhora quando usamos 2 emissores de IR . Isso ocorre pela maior difusão dos raios IR causado pela maior número de emissores. Para tanto, controles remotos usam lentes (lentes de Fresnel) que aumentam a difusão dos raios. Como não temos estas lentes usaremos vários emissores (4 por sensor) para melhorar a eficiência e sensibilidade. Neste caso é melhor cada emissor com um resistor, ou seja, o sistema em paralelo, o que acarretará um aumento no consumo de bateria.
Vídeos dos testes:
17/12/2012
Testes TCRT 5000 com ne555 no emissor e bc548 no receptor
Resultado: não houve melhora, continua com 2,5 cm
Teste TITAN com Arduino, gerando pulsos por PWM com frequência de 490Hz e BC558 utilizado para amplificar o sinal
Hoje realizamos um teste com os sensores TCRT5000 e o sensor artesanal Titan. Os seguintes testes foram realizados:
TRCT5000
BC548 - transistor com amplificação de 10 vezes
BC548 - BC548 - amplificação de 100 vezes
BC548 - TIP110 - amplificação de 5000 vezes
lm358 - amplificador ótico
Titan
BC548 - transistor com amplificação de 10 vezes
BC548 - BC548 - amplificação de 100 vezes
BC548 - TIP110 - amplificação de 5000 vezes
lm358 - amplificador ótico
ne555 frequência de 28,8 kHz (tempo de pico= 0,028ms e tempo de vale 0,007ms) no emissor e com BC548 como amplificador ótico
ne555 frequência de 28,8 kHz e com lm358
Resultados
Tabela 1- Valores obtidos de distância de um objeto pelos sensores testados
Teste
TCRT5000 (cm)
Titan (cm)
BC548
3,5
46
BC548 com BC548
4,5
4,5
BC548 com TIP110
4,2
12
lm358
27
6
Teste
Titan (cm)
ne555 e BC548
86
ne555 e lm358
33,5
Gráficos obtidos pelos melhores resultados com luz acesa e apagada
Vídeos dos melhores resultados
Teste de configuração com TCRT5000
TCRT5000
Teste com BC548
Teste com lm358
Teste com 2 BC548
Teste do sensor TITAN
com ne555 no emissor e Lm358
com lm358
com ne555 e bc548
com bc548
com bc548/TIP110
Conclusão
O capacitor ligado direto ao receptor funciona transformando o sinal de nalógico para digital, possibilitando o uso do programa do QR1113.
(Elaine - escrever resultados da tabela e ouras conclusões anotadas)
Próximos testes
Ligar o ne555 ao receptor de IR para controlar a frequência de recepção do sinal emissor, evitando interferência ambiente.
Testar o ne555 e o bc 548 no TCRT5000. Primeiro só ligando o ne555 ao emissor e depois ao emissor e receptor.
Testar o ne555 ao led reciclado de aparelhos eletrodomésticos.
28/11/2012 - Teste com 555
Hoje realizamos um teste de sensor utilizando o 555 em modo astável. Primeiro fizemos um pisca-pisca com led´s para testar a configuração do 555, usando um potenciômetro para controlar a velocidade do piscar:
Depois testamos o sensor TRCT5000 sem o 555 como forma de calibração:
O resultado, como esperado foi 2,5 cm para o sensor apresentar sensibilidade.
Testamos então, o TRCT5000 com o ne555 emitindo um frequência de 30kHz. Não temos como afirmar exatamente esta frequência pois não temos um osciloscópio mas, vamos procurar na internet como fazer. Pelos cálculos a frequência deveria ser essa. O resultado foi frustante, esperávamos uns 30 cm e o sensor continuou medindo 3 cm...
Testamos então o sensor feito para o TITAN artesanalmente e, o resultado foi acima do esperado - o sensor era capaz de identificar um objeto branco a cerca de 30 cm de distância, com boa sensibilidade e mantendo valores constantes.
Uma hipótese que discutimos está no fato do sensor ser montado com o emissor e o receptor ligados na mesma trilha (positivo) que, com o uso do 555, achamos que pode ter sincronizado os dois na mesma frequência eliminando possíveis ruídos.
Testamos também o LM358 para amplificar o sinal mas não houve resultado, parecia que o sensor estava desligado.
Iremos repetir todos os testes na semana que vem e montaremos um sensor artesanal direto na protoboard para comparar resultados.
17/11/2012 - Cálculo da frequência do 555
16/11/2012 - Nesta simulação usamos o 555 para modular um sinal com frequência de 30 kHz e um amplificador ótico, LM358, para amplificar o sinal, resultando num sinal amplificado de 9mA para 36 mA.
Simulado no Proteus.
15/11/2012 - Esquemas elétricos com 555 para sensor de ultrassom
Novembro 2012 - Artigo enviado para a Febrace 2013
DESENVOLVIMENTO DE SENSORES DE INFRAVERMELHO DE LONGA DISTÂNCIA PARA ROBÔS DE SUMÔ
Versão preliminar
Instituição: Pequenos Cientistas – EE Frei Dagoberto Romag
Endereço: R. José Valter Pacheco, Jd São José, Campo Limpo Paulista/SP Tel.: (011) 4039-3455
Autores: Elaine Nascimento Barbosa, Any Taisa Ramos de Andrade, Jhonatan Henrique dos Santos Vaz
Orientador: Alan Barbosa de Paiva
Área do projeto: ENGENHARIA - Eletrônica
Período de Desenvolvimento do Projeto: Abril 2012 a Março 2013
DESENVOLVIMENTO DE SENSORES DE INFRAVERMELHO DE LONGA DISTÂNCIA PARA ROBÔS DE SUMÔ
Versão preliminar
AUTORES: Elaine Nascimento Barbosa, Any Taisa Ramos de Andrade, Jhonatan Henrique dos Santos Vaz
ÁREA: Engenharia - eletrônica
ORIENTADOR: Alan Barbosa de Paiva
INSTITUIÇÃO: PEQUENOS CIENTISTAS – EE FREI DAGOBERTO ROMAG
INTRODUÇÃO
Sensores são elementos ativos ou passivos que servem para fornecer informações sobre o ambiente ou sobre grandezas físicas. Segundo Franchin (2012) “ o desenvolvimento de sensores é o aumento da habilidade do robô obter informações sobre o ambiente em que se encontra, bem como, de suas próprias características...”
Segundo Patsko (2006) “Literalmente, podemos definir a palavra sensor como ‘aquilo que sente’. Na eletrônica, um sensor é conhecido como qualquer componente ou circuito eletrônico que permite a análise de uma determinada condição do ambiente, podendo ser ela algo simples como temperatura ou luminosidade, ou uma medida um pouco mais complexa como a rotação de um motor ou a distância de um carro até algum obstáculo próximo, ou até mesmo eventos distantes como a detecção de partículas subatômicas ou radiações cósmicas”.
Existem diversos tipos de sensores e, cada um, para uma determinada função no ambiente. Um deles, é o sensor infravermelho que, segundo Medeiros (2005) “... é um tipo de radiação eletromagnética não ionizante. Ao interagir com a matéria, a radiação infravermelha não provoca a formação de íons, ou seja, não remove elétrons da matéria, mas provoca vibrações de algumas moléculas. O resultado da interação é o aumento da temperatura do sistema”.
Há várias aplicações dos sensores de infravermelho no dia-a-dia, como por exemplo, leitores de código de barras, indicadores de fim de curso em linhas de montagem, sensores de presença, sensores de passagem, sensores de distância e até mesmo no controle remoto da T.V. Robôs são um dos tipos de teste de aplicação das múltiplas funções destes sensores fazendo a leitura de distâncias, objetos, linhas e de outros fatores ambientais guiando-o e fornecendo dados para tomada de decisões e tem aplicações diversas como em áreas industriais como a automobilística, no desarmamento de bombas, no transporte de materiais, em operações militares, no serviço doméstico, na educação, na medicina, em desenvolvimento de próteses e na exploração espacial (ASSIS e COELHO, 2008). Estes sensores são feitos de um material piroelétrico natural ou artificial que produz tensão quando é aquecido. A maioria dos sensores infravermelho são revestidos com espelhos parabólicos ou lentes Fresnel afim de recuperar as ondas infravermelhas de uma sala inteira (SPENCER, 2012).
As vantagens destes sensores em relação a outros são seu custo, sua diversidade de aplicação (o mesmo sensor pode ser usada para diversas aplicações), sua velocidade de resposta e facilidade de desenvolvimento, além da sua imunidade a interferência, apesar da influência da iluminação natural e artificial do ambiente (1BRAGA, 2011). Além disso, tem dificuldade em distinguir entre objetos que irradiam semelhantes níveis de energia térmica (SPENCER, 2012).
OBJETIVOS
Projetar e construir um sensor de infravermelho, utilizando componentes de baixo custo, capaz de detectar distâncias superiores a 30 centímetros, que seja capaz de ler linhas brancas ou pretas sofrendo o mínimo de interferência da luz ambiente. Estes sensores serão aplicados em robôs, que utilizam o Arduino, onde seus pulsos elétricos e dados coletados do ambiente serão essenciais para seu funcionamento.
JUSTIFICATIVAS
Uma das grandes motivações de desenvolver um sensor de infravermelho de longa distância para robôs de competição (combate e resgate) é a falta de referências disponíveis sobre o tema. Quando se pesquisa no Google sobre o tema, aparecerem sensores de poucos centímetros, o sensor comercial da SHARP ou sensores de ultrassom.
Além disso, sensores de infravermelho têm uma velocidade de resposta maior quando comparada a sensores de ultrassom, pois usam a luz infravermelha que viaja a uma velocidade maior que o som no ambiente.
Outra vantagem de sensores de infravermelho em relação a ultrassom é a aplicação destes sensores que são capazes de detectar objetos, medir distância e seguir linhas de qualquer cor, enquanto sensores de ultrassom, medem distâncias e detectam objetos.
Por último, devido à facilidade de obtenção de componentes e montagem, sensores de infravermelho são mais baratos para construir que outros tipos, além de poderem ser construídos com materiais facilmente obtidos em lixo eletrônico.
METODOLOGIA
Alguns parâmetros são essenciais para avaliar sensores, dentre os quais, serão avaliados 4 deles:
- Linearidade – capacidade do sensor manter o resultado dentro de uma faixa constante de valores.
- Sensibilidade: capacidade do sensor identificar uma linha branca em fundo preto e uma linha preta em fundo branco, claramente (valores opostos), sem sofrer influência do ambiente. Verificar a possibilidade do sensor identificar a cerca de 15 centímetros de distância cores diferentes.
Estes parâmetros serão medidos através do Serial Monitor do Arduino, utilizando a porta analógica ou digital e o programa SIMPLOT (CAVALCANTE e DAMASCENO, 2012).
- Velocidade de resposta: tempo médio de resposta do sensor a mudança do ambiente – branco e preto. Este parâmetro será medido no teste de aplicação em um chassi.
- Maior distância atingida pelo sensor. Será medido nos testes em suporte de protoboard.
O projeto está dividido em 2 fases distintas:
1ª Fase – teste de sensor em protoboard – todos os sensores serão montados em protoboard´s e analisados através do Serial Monitor do Arduino, por 30 segundos, utilizando o sketch para leitura de sensores de LDR e informações do datasheet do sensor infravermelho QR1113 (CAVALCANTE e DAMASCENO, 2012). A protoboard será colocada na base de um suporte universal com uma presilha, tendo uma régua de medida (plástica comum) ao fundo para determinar a distância de leitura. Todos os testes serão repetidos 5 vezes em 3 dias diferentes.
2ª Fase – o melhor sensor da fase 1 será montado em placa de circuito impresso e, as placas, instaladas em um chassi de combate que irá competir numa arena, contra um robô da mesma categoria utilizando sensores de ultrassom. Será feito uma disputa simular ao Torneio Juvenil de Robótica da USP em melhor de 3 rounds, repetidos 3 vezes.
O registro do projeto será feito através do blog www.cienciaemconsciencia.blogspot.com e através de vídeos gravados dos testes, publicados no blog e no you tube.
CRONOGRAMA
O QUÊ
COMO
QUANDO
REVISÃO DA LITERATURA
SITES DA INTERNET
SETEMBRO 2012 A JANEIRO 2013
TESTES DE DESENVOLVIMENTO
ROTEIRO ABAIXO
OUTUBRO 2012 A FEVEREIRO 2013
TESTES DE APLICAÇÃO
DESAFIO DE ROBÔS DE SUMÔ
FEVEREIRO 2013
ANÁLISE DOS DADOS
INTERPRETAÇÃO DOS GRÁFICOS GERADOS
DEZEMBRO 2012 A FEVEREIRO 2013
CONCLUSÃO
REVISÃO DO PROJETO E ADIÇÃO DA ANÁLISE DOS DADOS
FEVEREIRO A MARÇO 2013
ESCRITA DO ARTIGO FINAL
REVISÃO DO PROJETO E ADIÇÃO DA ANÁLISE DOS DADOS E CONCLUSÃO
FEVEREIRO A MARÇO 2013
TESTE
TIPO DE COMPONENTE
PRAZO
FONTE
TIL 32 E TIL 78
RESISTOR 150 E 10KΩ
NOVEMBRO
SOCIETY OF ROBOTS
TCRT 5000
RESISTOR 150 E 10KΩ
NOVEMBRO
DATASHEET
SENSOR RECICLADO
RESISTOR 150 E 10KΩ
NOVEMBRO
LUSOROBOTICA
QR1113
-
NOVEMBRO
DATASHEET
MELHOR SENSOR
CAPACITOR DE 100nF
DEZEMBRO
SENSOR QR1113
BC548/TIP120
DEZEMBRO
NEWTON C. BRAGA2
NE555 E LM358
FEVEREIRO
NEWTON C. BRAGA2
APÓS OS TESTES O MELHOR SENSOR PASSA PARA A SEGUNDA FASE
MELHOR SENSOR
MELHOR AMPLIFICADOR
FEVEREIRO
Resultados preliminares
Este projeto está sendo desenvolvido em conjunto com a equipe Pequenos Cientistas da EE Elza Facca Martins Bonilha, de Campo Limpo Paulista, projeto “Desenvolvimento de sistemas de tração para chassis robóticos de competição de baixo custo utilizando Arduino e reciclagem”, robô chamado Hermes e o chassi Titan.
Esquema elétrico do sensor robô Titan/Orion
Robô Titan e Orion
Uma solução foi encontrada parcialmente na internet, no site Luso Robótica, que propunha sensores usando emissores e receptores vindos da controle remoto e aparelhos eletrodomésticos (http://lusorobotica.com/ index.php/topic,527 .0.html). Testamos o sensor mas este não atingiu uma distância interessante (conseguia apenas 5 cm de sensibilidade), com a desvantagem do extremo aquecimento da placa e, num dos testes, o curto circuito dos emissores. A opção então, foi construir sensores mais baratos com led´s de 5mm e resistores de 1/4W e, obter emissores dos controle remotos. Fizemos testes com resistores de vários valores (330, 220 e 100 ohm e um sensor com maior espaçamento entre o emissor e receptor) e, o melhor resultado foi o sensor com 100 ohm (14 cm).
Esquema elétrico para construção de um sensor reciclado (PARALLAX, 2010).
Medida de altura de reflexão dos sensores
Testamos os sensores utilizando o multímetro, celulares para verificar a emissão de infravermelho e o Arduino para calibrar a leitura, usando uma atividade da apostila do EDUCASAEN,que fazia a leitura de um LDR (CAVALCANTE e DAMASCENO, 2012). O resultado indicou que o melhor sensor usa um resistor de 100 ohm no emissor e um 10k ohm no receptor. Um teste indicou também que o LM358 poderia funcionar bem para amplificar o sinal mas não deu tempo de fazer a placa. Uma outra opção comercial é o sensor TRCT5000, que usa um resistor de 150ohm no emissor e um resistor de 10kohm no fototransistor.
Sensor de IR Artesanal e Sensor TRCT 5000
Dados preliminares comprovam que, o sensor artesanal do TITAN quando comparado ao sensor TRCT5000, apresenta detecção de objetos a uma maior distância e, o TRCT5000, apresenta resultados melhores em relação a linearidade e influência em relação a ruídos externos – interferência da luz ambiente, conforme os gráficos gerados abaixo.
Comparação da altura dos sensores TRCT5000 e Titan
Teste de comparação sensor artesanal – TITAN e TRCT5000.
CAVALCANTE, M e DAMASCENO, E. S. Oficina Arduino: EDUCASAEN; [S.I.]: Educasaen, disponível em: http://www.educasaen.blogspot.com, acesso em: 06/07/2012.
ALLDATASHEETS, TIL 78, [S.I.]: Datasheet catalog, disponível em: http://search.datasheetcatalog.net/key/TIL78, acesso em : 08/10/2012.
ALLDATASHEETS, TIL 32, [S.I.]: Datasheet catalog, disponível em: http://search.datasheetcatalog.net/key/TIL32, acesso em : 08/10/2012.
LUSOROBOTICA, Tutorial: Sensor IR que custa 0€, [S.I.]: Luso Robótica, disponível em: http://lusorobotica.com/index.php/topic,837.0.html, acesso em : 08/09/2012.
1BRAGA, N. C. Sensoriamento Infravermelho (ART639),[S.I.]: newtoncbraga, disponível em: http://www.newtoncbraga.com.br/index.php/artigos/49-curiosidades/4577-art639.html, acesso em : 25/10/2012.
2BRAGA, N. C. Seleção de circuitos com sensores (ART761), [S.I.]: newtoncbraga, disponível em: http://www.newtoncbraga.com.br/index.php/ artigos/54-dicas /5781-art748.html, acesso em : 25/10/2012.
ASSIS, W de O e COELHO, A. D. Automação industrial e robótica; Revista Mecatrônica Fácil, nº 45, ano 6, 2008.
MEDEIROS, M. A. Ferro de passar roupas a controle remoto: a presença do infravermelho no dia-a-dia; [S.I.]: quiprocura; disponível em: http://www.quiprocura.net/infraferro/index.html, acesso em 08/10/2012.
PATSKO, L. F. Tutorial de eletrônica: aplicação e funcionamento de sensores; [S.I.]: Maxwell Bohr, 2006, disponível on-line em: http://www.maxwellbohr.com.br/downloads/robotica/mec1000_kdr5000/tutorial_eletronica_-_aplicacoes_e_ funcionamento_de_sensores.pdf, acesso em 08/10/2012.
31/10/2012
Teste comprativo de sensores infravermelho - TRCT5000 e sensor TITAN
Esquemas elétricos
fotos
Vídeos
Análise dos dados
30/09/2012
Adquirimos um sensor modelo QR1113 com as seguintes características
Tensão de alimentação: 5v
Corrente do emissor: 1A
Corrente do receptor: 20mA
A grande diferença do sensor analógico pra o digital é a presença de um capacitor que atua como condensador.
Como programação de calibração sugere-se pelo mesmo site o seguinte sketch:
int SensorPin=2;
int Sensorval=LOW;
void setup()
{
pinMode(13,OUTPUT);
Serial.begin(9600);
}
void loop()
{
pinMode(2,OUTPUT); // Primeiro é necessário configurar o pino do Arduino (digital 2) que conecta o Vout do
digitalWrite(2,HIGH); //breakout como saída para descarregar o capacitor, colocando o pino digital 2 do Arduino
delayMicroseconds(10); // em alto (HIGH) e depois uma espera de 10 microssegundos
pinMode(2,INPUT); // E por fim configura o pino do Arduino (digital 2) como entrada
long time = micros();
// Enquanto o tempo for menor que 3000 microssegundos e o pino do sensor for alto (HIGH), então o valor do sensor
// será a diferença entre o tempo atual e o tempo anterior.
while (digitalRead(SensorPin) == HIGH && micros() - time < 3000);
int diff = micros() - time;
Sensorval=diff;
if(Serial.available()>0);
{
Serial.println(Sensorval);
}
delay(500);
}
25/08/2012
Estávamos trabalhando num sensor IR usando partes de controle remoto (led emissores) e recpetores que existem em aparelhos com controle remoto. O sensor que fizemos, além de aquecer o resistor, mantinha pequenas distâncias (5cm). Bom, pesquisando no site do Arduíno (www.arduino.cc) encontrei o que pode ser a solução para o problema - na base do TSOP ligamos um resistor de 10Kohm, como os receptores normais mas, segundo a apostila da parallax (Apostila parallax) de onde eu tirei o esquema abaixo apareceu a solução - ligar um resistor de 220 ohm na base. Com isso a estimativa é um sensor de 30 cm. Se der certo conseguiremos 4 sensores de distância IR com boa resolução.
Sugiro o uso de resistores de 100 a 200 ohm no emissor para uma melhor distância.