30/08/2013 - Novo projeto
Decidimos que o projeto Osíris precisava ser reformulado com as seguintes mudanças:
1- Inserção de um sistema de bateria mais eficiente: vamos usar as entradas analógicas do Arduino para controlar o gasto de bateria, gerenciando as baterias pelo próprio robô.
2- Mudança no peso do robô: usando o princípio da reciclagem, vamos usar um novo drive de cd, mais moderno que o anterior, que usa alumínio em vez de ferro na estrutura do robô. Isso vai fazer com que a estrutura do robô fique 300 gramas mais leve.
3- Correções na estrutura causadas pela dificuldade de se furar o material.
4- Correções na parte superior para adequar a luta de sumô e a necessidade de se colocar uma garra.
5- Inserção do sistema de radar usando servo-motor e sensor de ultrassom.
Outros detalhes técnicos serão alterados mas são confidenciais pois envolvem as táticas de combate que utilizaremos.
Partindo deste princípio e por decisão da equipe, o nome do robô será mudado de Osíris para Hórus nos baseando na história que pesquisamos sobre o tema:
Fonte: http://pt.wikipedia.org/wiki/Horus
Tinha cabeça de falcão e os olhos representavam o Sol e a Lua. Matou Seth, tanto por vingança pela morte do pai, Osíris, como pela disputa do comando do Egito[carece de fontes].
Após derrotar Seth, tornou-se o rei dos vivos no Egito. Perdeu um olho lutando com Seth, que foi substituído por um amuleto de serpente, (que osfaraós passaram a usar na frente das coroas), o olho de Hórus, (anteriormente chamado de Olho de Rá, que simbolizava o poder real e foi um dos amuletos mais usados no Egito em todas as épocas.[carece de fontes] Depois da recuperação, Hórus pôde organizar novos combates que o levaram à vitória decisiva sobre Seth.
O olho que Hórus feriu (o olho esquerdo) é o olho da Lua, o outro é o olho do Sol. Esta é uma explicação dos egípcios para as fases da lua, que seria o olho ferido de Hórus.
Alguns detalhes dopersonagemforam alterados ou mesclados com outros personagens ao longo das váriasdinastias,seitase religiões egípcias. Por exemplo, quando Heru (Hórus) se funde com Ra O Deus Sol, ele se torna Ra-Horakhty. O olho de Horus egípcio tornou-se um importante símbolo de poder chamado de Wedjat, que além de proporcionar poder afastava o mau-olhado, pois segundo os egípcios os olhos eram os espelhos da alma.
23/08/2013 - Resultados 2013 - Torneio J. Robótica
Após a medalha conquistada na OBR, na categoria Dedicação, como prêmio de mérito, o Osiris conseguiu mais 3 medalhas para equipe, 2 de prata no sumô e 1 de bronze no cabo de guerra, se tornando o robô que mais medalhas ganhou até agora no projeto.
Ainda assim há um certo quê de fracasso no resultado pois era o robô melhor preparado. Um erro de execução do que havia sido combinado em termos de bateria resultou no desgaste de todas as baterias e no comprometimento dos robôs. Além disso, não contávamos com o revés de perder as 3 baterias de LIPO 11V/1A que descarregaram abaixo dos 3V/células o que ocasionou o dano às baterias, que ocorreu na quinta-feira antes do torneio, resultado da falta de recursos necessários na área de baterias. Em breve receberemos, pela EE Elza Facca a verba dos projetos descentralizados o que resolverá em parte o problema de baterias. Ainda não será totalmente pois o investimento nessa área será alto (R$500,00 por escola) e, como só recebemos um apoio, estamos com déficit de 50% no orçamento.
Vale ressaltar que um dos nossos grandes problemas foi resolvido com o apoio do Mc´Donalds Av. Jundiaí, que nos forneceu os lanches.
O efeito da bateria pode ser visto no vídeo abaixo, na luta Osiris vs Inacio:
Quem viu depois esses robôs, após a solução do problema de baterias se surpreende.
28/06/2013- Teste de combate do Osíris
Neste teste o robô está programado para encontrar a linha e retornar. Usando 100% da potência.
20/06/2013 - Teste de combate Osiris
Teste do robô Osíris numa simulação de arena, preparatório para lutas de sumô.
Neste teste o robô estava programado para localizar a linha preta e depois recuar, parando em seguida.
12/04/2013
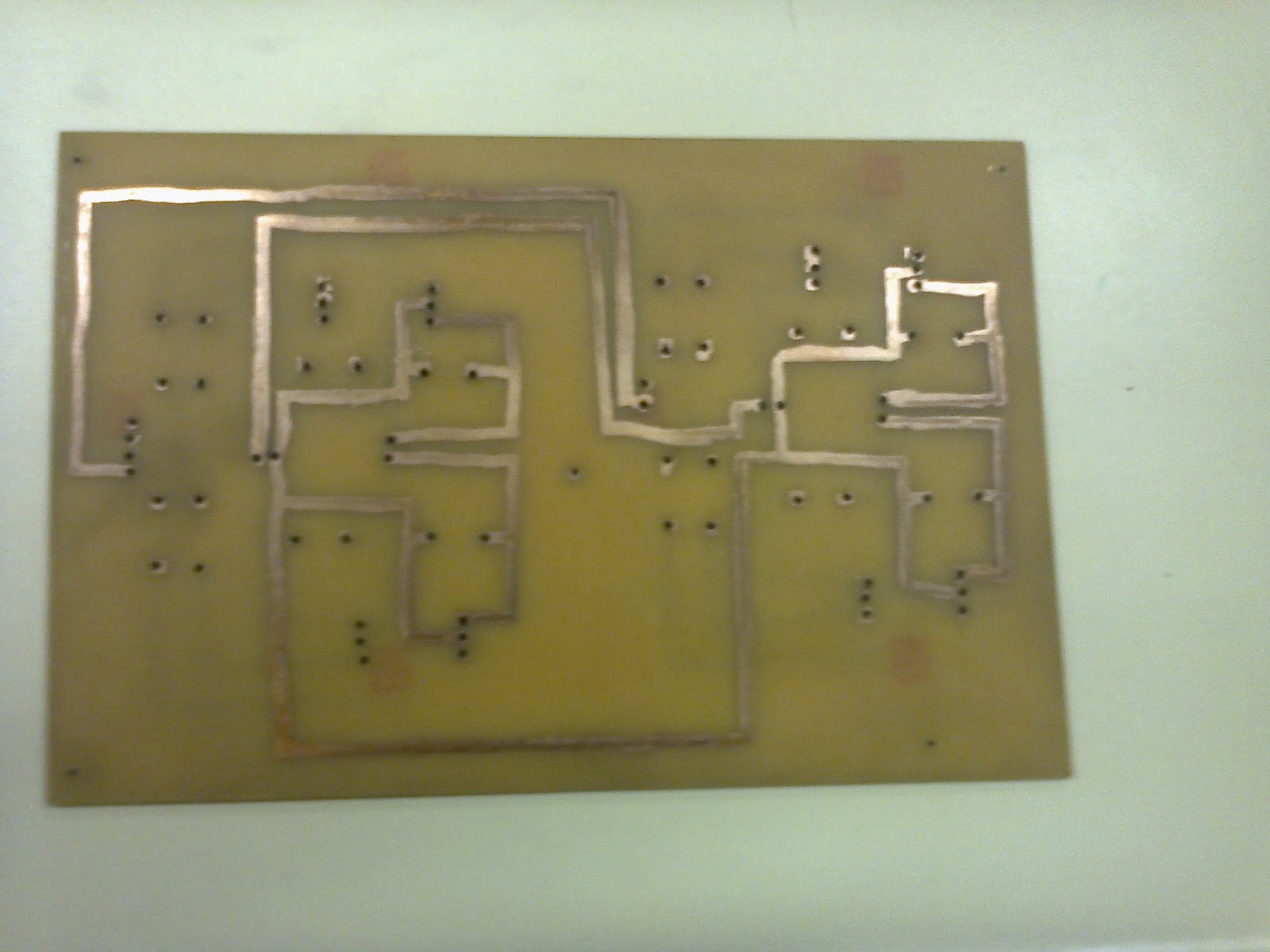
Fotos da placas dual layer de ponte H com TIP produzida por método térmico, faltando apenas soldar os componentes:
05/04/2013
Teste de motores do robô Osíris: usando uma fonte 9V/500 mA e com a nova esteira.
Teste do Osíris arrastando um objeto: 500 gramas aproximadamente.
Próxima etapa: Adição de uma ponte H de TIP (NPN) feita em protoboard e elaboração de placa de circuito para o motor por método térmico.
30/03/2013
Fizemos hoje a placa de circuito - ponte H dupla - para controle de 2 motores usando o TIP (110/115 ou 120/127).
https://skydrive.live.com/redir?resid=AC8ECA0DCFBBC517!427&authkey=!AATyvgnHh5cZ-_E
29/03/2013
Adicionado os motores a estrutura do robô. Foram observadas 2 dificuldades:
1- Após a adição dos motores um dos lados ficou "penso", ou seja, apresentou desequilíbrio por conta do peso diferente dos motores. Tal situação foi suavizada com a inserção de esponjas na base do motor e com a inserção das esteiras.
2- Os motores ainda estão soltos. Isso será resolvido com o uso de parafusos para fixação dos motores.
Além destas correções serão instaladas duas esteiras feita de uma borracha doada pela empresa CIKALA de São Paulo (caso se interessem pelo material procure na lista de apoiadores) colada com um pedaço de borracha de câmara de ar de carro e araldite, além disso, uma pequena regulagem dos furos de suporte do motor deve terminar com o problema de desajuste do chassi. Após esta etapa será colocada a fiação do motor e será feito um teste sem drive de motor para avaliar o funcionamento do robô.
Em reunião hoje, ficou decidido que será usado um driver de motor feito com TIP 110/115 em placa de circuito impresso para o controle de robôs, por sua praticidade e potência, favorecendo o robô. Além disso, temos material suficiente para fazer 10 drives como esse, possibilitando a construção de drivers de reserva.
Fotos da montagem do robô e da medição da esteira:
15/03/2013
Estrutura do robô terminada: o chassi do Osíris está pronto, aguardando a instalação dos motores e fixação dos mesmos e a adição da da protoboard. Em relação a estrutura, falta a adição de arruelas para melhorar a lubrificação do sistema e diminuir o atrito.
O furo no meio é para a passagem da fiação do motor e das baterias.
24/02/2013
Iniciamos a construção de um novo projeto de robô de esteiras, sob responsabilidade do aluno Marcelo (ETEC - EE Elza Facca M. Bonilha).
Descrição do projeto:
Robô de esteiras multi-tarefas: resgate de alto-risco, sumô e outros, feito com chassi de alumínio retirado de drives de cd e motores de passo de impressora (ainda em estudo se vai usar redução de impressora, ou correias de transmissão entre os eixos. O eixo dianteiro será segmentado em duas partes, tornando os eixos independentes. As rodas são feitas de roletes de impressora HP e Epson.
A esteira provavelmente será feita de corrente de metal ou correia de borracha. A alimentação será feita por baterias 11V/1A, controle de motores por L298n e o controle do robô, pelo Arduino UNO.
Provavelmente usaremos um sensor de ultrassom acoplado a um servo de posição indicando o local do objeto e sensores de IR para leitura de linha. Talvez mais uns sensores de IR para localizar objetos.
Primeiras fotos:
O significado de Osíris:
Osíris (Ausar em egípcio) era um deus da mitologia egípcia, associado à vegetação e a vida no Além. Oriundo de Busíris, no Baixo Egipto, Osíris foi um dos deuses mais populares do Antigo Egipto, cujo culto remontava às épocas remotas da história egípcia e que continuou até à era Greco-Romana, quando o Egito perdeu a sua independência política.
Marido de Ísis e pai de Hórus[2], era ele quem julgava os mortos na "Sala das Duas Verdades", onde se procedia à pesagem do coração ou psicostasia.
Osíris, é sem dúvida o deus mais conhecido do Antigo Egipto, devido ao grande número de templos que lhe foram dedicados por todo o país; porém, os seus começos foram os de qualquer divindade local,e é também um deus que julgava a alma dos egípcios se eles iam para o paraíso (lugar onde só há fartura).Para os seus primeiros adoradores, Osíris era apenas a encarnação das forças da terra e das plantas. À medida que o seu culto se foi difundindo por todo o espaço do Egipto, Osíris enriqueceu-se com os atributos das divindades que suplantava, até que, por fim substituiu a religião solar. Por outro lado a mitologia engendrou uma lenda em torno de Osíris, que foi recolhida fielmente por alguns escritores gregos, como Plutarco. A dupla imagem que de ambas as fontes chegou até nós deste deus, cuja cabeça aparece coberta com a mitra branca, é a de um ser bondoso que sofre uma morte cruel e que por ela assegura a vida e a felicidade eterna a todos os seus protegidos, bem como a de uma divindade que encarna a terra egipcia e a sua vegetação, destruída pelo sol e a seca, mas sempre ressurgida pelas águas do Nilo.
A biblioteca do motor de passo do Arduino apresenta o passo completo 2 conforme abaixo:
Passo completo 1 (Full-step) -Somente uma bobina é energizada a cada passo; -Menor torque; -Pouco consumo de energia; -Maior velocidade.
Passo completo 2 (Full-step) -Duas bobinas são energizadas a cada passo; -Maior torque; -Consome mais energia que o Passo completo 1; -Maior velocidade.
Meio passo (Half-step) -A combinação do passo completo1 e do passo completo 2 gera um efeito de meio passo; -Consome mais energia que os passo anteriores; -É muito mais preciso que os passos anteriores; -O torque é próximo ao do Passo completo 2; -A velocidade é menor que as dos passos anteriores.
Neste caso temos sempre 2 bobinas acionadas, o que consome mais energia durante o funcionamento. Para evitar este consumo é preciso reduzir os passos ao passo completo 1:
Mas para isso se faz necessário a criação de um programa de passos para acionamento do motor, conforme modelo abaixo:
/* Este código permite o passo de 1 motor - PASSO 1*/
//motor direito
int motorPin1 = 7;
int motorPin2 = 8;
int motorPin3 = 3;
int motorPin4 = 4;
int tempopasso = 3000;
void setup() {
//configura os pinos digitais do motor direito
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
}
void loop() {
//motor direito
digitalWrite(motorPin1, HIGH);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay (tempopasso);
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, LOW);
delay (tempopasso);
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, HIGH);
digitalWrite(motorPin4, LOW);
delay (tempopasso);
digitalWrite(motorPin1, LOW);
digitalWrite(motorPin2, LOW);
digitalWrite(motorPin3, LOW);
digitalWrite(motorPin4, HIGH);
delay (tempopasso);
}
O problema está no cálculo do tempo de passo, que não pode ser menor que 10ms. Sabendo os valores máximos de RPM e step do motor, que podem ser obtidos usando o programa stepper_oneStepAtATime (examples - stepper) basta usar a fórmula abaixo para o cálculo:
Exemplo:
RPM = 100
Passos = 48 (Step 7,5º)
Para tanto pode-se construir uma função:
int rpm = 100;
int passos = 48;
int tempo;
tempo passo = rpm/(passos*60)
Com essa função podemos usar todos os tipos de passo (passo 1, 2 e meio passo, basta modificar os HIGH e LOW dos pinos abaixo. O código final fica assim:
/* Este código permite o passo de 1 motor - PASSO 1*/
As provas estão dirigidas aos grupos etários divididos em níveis: Nível I (alunos com até 11 anos, inclusive), Nível II (alunos de 12 até 14 anos, inclusive), Nível III (alunos de 15 até 16 anos, inclusive), Nível IV (alunos de 17 até 18 anos, inclusive).
As provas devem ser realizadas sob a responsabilidade de um professor supervisor, devidamente inscrito na organização.
As provas devem ser realizadas sem o emprego de consulta e de calculadoras.
A data de realização é definida pela escola dentro do período definido para a prova, ou seja, de 02 a 15 de junho de 2013.
O local de realização é definido pela escola, onde estará o professor supervisor.
O horário para a realização da prova fica a critério do professor supervisor, conforme as condições oferecidas pela escola onde essa será efetuada.
O prazo para a realização da prova é de 2 horas.
As provas podem ser realizadsa de forma online ou com material impresso, a critério do professor supervisor.
O conteúdo da prova, exatamente o mesmo para a versão online ou para a impressa, estará à disposição do professor supervisor, a partir de 2 dias antes do período de prova, através de e-mail enviado pela organização
Detalhamento da proposta e do conteúdo
Cada prova contém 20 questões de múltipla escolha, visando a avaliar a capacidade de aplicação de conceitos envolvidos com a prática da robótica, o estágio de desenvolvimento de habilidades requisitadas para a compreensão e atuação diante de novos problemas típicos dessa área de conhecimento e, principalmente, o desempenho das competências do aluno frente à necessidade da tomada de decisões.
Cada prova apresenta 4 problemas típicos daqueles que se oferecem aos alunos nos desafios práticos do Torneio Juvenil de Robótica e em outras competições internacionais, para que as soluções oferecidas às situações decorrentes desses problemas, pela banca proponente do exame, possam ser apreciadas e valoradas pelo aluno.
Nesse modelo de avaliação, o desempenho do aluno candidato ao exame decorre do discernimento criterioso das melhores soluções apresentadas aos problemas.
Detalhamento da estrutura física da prova
A prova enviada ao professor supervisor estará em formato PDF e não poderá ser reproduzida em nenhum outro formato digital sem a autorização expressa da organização e destina-se à reprodução impressa.
A prova para ser resolvida online estará em formato apropriado ao sistema online, naturalmente suportados pelos navegadores Firefox e Google Chrome em suas últimas versões.
Dessa vez nos saímos 2 vezes sem querer: na primeira vez na página 3 falando sobre a reportagem no Jornal de Jundiaí "Tecnologia Aliada a Educação" e, sem querer, na segunda vez na página 4 anunciando a entrada do aluno Paulo da EE Elza Facca M. Bonilha no programa da Astra de primeiro emprego.
Parabéns aos alunos e em especial ao aluno Paulo (ps. não esquecemos de você Elaine na Takata, mas você não nos deixa tirar fotos de seu crachá...)
31/05/2013
O projeto EFF1520 foi batizado de Apollo:
"Apolo (em grego: Ἀπόλλων, transl.Apóllōn, ou Ἀπέλλων, transl. Apellōn) foi uma das divindades principais da mitologiagreco-romana, um dos deuses olímpicos. Filho de Zeus e Leto, e irmão gêmeo de Ártemis, possuía muitos atributos e funções, e possivelmente depois de Zeus foi o deus mais influente e venerado de todos os da Antiguidade clássica. As origens de seu mitosão obscuras, mas no tempo de Homero já era de grande importância, sendo um dos mais citados na Ilíada. Era descrito como o deus da divina distância, que ameaçava ou protegia deste o alto dos céus, sendo identificado com o sol e a luz da verdade. Fazia os homens conscientes de seus pecados e era o agente de sua purificação; presidia sobre as leis da Religião e sobre as constituições das cidades, era o símbolo da inspiração profética e artística, sendo o patrono do mais famoso oráculo da Antiguidade, o Oráculo de Delfos, e líder das Musas. Era temido pelos outros deuses e somente seu pai e sua mãe podiam contê-lo. Era o deus da morte súbita, das pragas e doenças, mas também o deus da cura e da proteção contra as forças malignas. Além disso era o deus da Beleza, da Perfeição, da Harmonia, do Equilíbrio e da Razão, o iniciador dos jovens no mundo dos adultos, estava ligado à Natureza, às ervas e aos rebanhos, e era protetor dos pastores, marinheiros e arqueiros. Embora tenha tido inúmeros amores, foi infeliz nesse terreno, mas teve vários filhos. Foi representado inúmeras vezes desde a Antiguidade até o presente, geralmente como um homem jovem, nu e imberbe, no auge de seu vigor, às vezes com um manto, um arco e uma aljava de flechas, ou uma lira, e com algum de seus animais simbólicos, como a serpente, o corvo ou o grifo." Fonte:http://pt.wikipedia.org/wiki/Apolo
Já foi para a OBR com este nome, mas o projeto final receberá uma revisão na sua estrutura que se apresentou fraca em relação ao nosso padrão. Depois da queda dois dias antes da OBR (23/05), ainda se mostrou forte suficiente para entrar na arena e marcar nossos primeiros pontos na competição.
Dentro do plano de melhorias sofrerá estas alterações com data limite para 17/06.
08/05/2013
Depois de vários revezes na construção deste projeto, entramos numa fase crítica e o projeto inicial sofreu alterações. Apesar do chassi ainda não estar pronto já estamos trabalhando nas salas. Hoje desenvolvemos o programa para a sala 3 da OBR onde o robô deverá resgatar a vítima. No caso do Ensino Fundamental, basta o robô se aproximar da vítima e emitir um sinal sonoro e luminoso a 5 cm. Começamos programando a base do projeto conforme esquema abaixo:
O teste começou usando o buzzer emitindo um som de alarme e os led´s piscando:
10/04/2013
Usando o esquema de sensor IR e, substituindo o fototransistor e o led emissor por um led de alto brilho (branco) e um LDR, desenvolvemos um sensor de linha que alcança cerca de 15 cm:
Vídeo do teste abaixo:
Além disso, concluímos a parte de elaboração e corrosão da placa de controle de motores conforme fotos abaixo, falta só soldar os componentes:
30/03/2013
Fizemos hoje a placa de circuito - ponte H dupla - para controle de 2 motores usando o TIP (110/115 ou 120/127).
Hoje terminamos a estrutura do robôs falta apenas terminar de instalar os motores. Desenvolvemos a ponte H na protoboard e já testamos em outro projeto (EMF1520) com bom resultado.
06/03/2013
Corte dos eixos com caixa de redução para os chassis.
20/02/2013
Fotos das primeiras peças para montagem do robô: motor e caixa de redução e caixa da fonte ATX desmontada:
13/02/2013
Este projeto será desenvolvido pelo Jhonatan e pelo João Gabriel. Será um robô de 20x20 com sistema de tração independente dos lados (o eixo dianteiro será separado do eixo traseiro) e, com os motores que encontramos em impressoras, que já vem com redução, provavelmente será de esteiras, feitas de borracha de câmara de pneu de carro coladas com cola epoxi e vulcanizadas com ferro de passar roupa (ideia do Jhow). O chassi será feito de alumínio retirado de fontes ATX de computador, furadas as dimensões.
Ao Paulo caberá a responsabilidade de cortar os eixos. Um dos maiores desafios será fixar o motor no chassi e fazer a divisão do eixo dianteiro. Em breve postaremos a foto mas a ideia preliminar segue abaixo:
Em relação ao controle dos motores, utilizaremos uma ponte H construída inicialmente em protoboard, feita com TIP120 (NPN) e TIP122 (PNP), capaz de suportar correntes de até 6A, e tensões das mais varíáveis, provavelmente usaremos baterias de 11,1 V/1Ah, com taxa de descarga de 25C, conforme esquema abaixo:
Este projeto tem como objetivo um robô de resgate de alto risco e lutador de sumô. Quanto a sensores, provavelmente serão usados os TCRT 5000 (só usaremos os QRE1113 senão houver espaço) e um ou 2 sensores de ultrassom HC-SR04, dependendo de quantos tivermos na época.
21/04/2013
Drive de motor com l298 simples
https://skydrive.live.com/redir?resid=AC8ECA0DCFBBC517!447&authkey=!ABoltnIaQz27muk
será feito na quarta 24/04
27/03/2013
Teste de motores - 1 volta para frente e 1 volta para trás
20/03/2013
Instalação dos motores e primeiro teste: usamos a ponte H feita em protoboard pela equipe do ensino fundamental para testar o suporte dos motores e verificar a tração do robô. Os motores estavam com mesmo sentido e, por ter apenas uma par de pontes H, não é possível virar o motor. Agora iniciamos o processo de montagem das placas.
Fotos da montagem do suporte: 2 parafusos prendem uma placa de alumínio ao motor, pressionando-o para baixo, apoiados no chassi
O robô montado - ficou feio mas funciona!
Vídeos dos testes
13/03/2013
Estrutura finalmente completada. O 2º eixo foi cortado e adicionado as rodas, foi terminada a estrutura do chassi. Agora vamos instalar os motores e colocar os drives para testar a velocidade do chassi e a tração - que será feita por uma correia de borracha.
06/03/2013
Estrutura construída. Ainda faltam as rodas dianteiras e a fixação do motor, mas a estrutura já está terminada. O eixo de aço pesou um pouco mas estamos confiantes que o motor será suficiente. Ferramentas fazem a diferença: passar o esmeril nos furos favoreceu a "lubrificação" das rodas. Ainda falta a placa controladora de motores.
20/02/2013
Segue abaixo as primeiras fotos da estrutura do chassi cortado, com o suporte das rodas e o chanfro do suporte do motor, bem como detalhes construtivos do robô:
Sistema todo montado: 2 chapas (macho e fêmea) e detalhe do motor pressionando gravitacionalmente a roda.
16/02/2013 Código do projeto: EMF1520
Ideia: um robô que utiliza motores de passo bipolar retirados de impressoras Epson matricial com alto torque (pelo menos é o que parece). Esses motores coordenam correias que puxam a cabeça de impressão. Os motores serão colocados na parte superior do robô, diferente do que fazemos, apoiados sobre as rodas, com uma esteira de borracha passando entre eles.
As rodas serão retiradas de roletes de impressora HP série 600, com eixo cortado (função do Paulo), serão colocados na parte inferior do chassi. Usamos anéis de borracha para fixar as rodas e eixos nos furos, arruelas para diminuir o atrito do eixo com o chassi.
O chassi foi montado da carcaça de um dvd velho cortado e furado sem brocas de metal, com 2 placas superpostas para conferir maior resistência e leveza, visto que a carcaça é um tipo de liga de alumínio, que é resistente mas bem leve, conforme as figuras abaixo:
O Thiago trouxe um esmeril para furadeira que ajudou a lixar e evitar cortes porém as brocas ainda são um problema - tente furar uma chapa de metal com brocas para madeira e alvenaria e você vai entender.
Em breve colocaremos as fotos das outras partes do chassi.
Fotos dos motores retirados de impressora com as borrachas de teste.
Impressora matricial sendo desmontada e detalhe do motor