
O projeto EFF1520 foi batizado de Apollo:
"Apolo (em grego: Ἀπόλλων, transl. Apóllōn, ou Ἀπέλλων, transl. Apellōn) foi uma das divindades principais da mitologia greco-romana, um dos deuses olímpicos. Filho de Zeus e Leto, e irmão gêmeo de Ártemis, possuía muitos atributos e funções, e possivelmente depois de Zeus foi o deus mais influente e venerado de todos os da Antiguidade clássica. As origens de seu mitosão obscuras, mas no tempo de Homero já era de grande importância, sendo um dos mais citados na Ilíada. Era descrito como o deus da divina distância, que ameaçava ou protegia deste o alto dos céus, sendo identificado com o sol e a luz da verdade. Fazia os homens conscientes de seus pecados e era o agente de sua purificação; presidia sobre as leis da Religião e sobre as constituições das cidades, era o símbolo da inspiração profética e artística, sendo o patrono do mais famoso oráculo da Antiguidade, o Oráculo de Delfos, e líder das Musas. Era temido pelos outros deuses e somente seu pai e sua mãe podiam contê-lo. Era o deus da morte súbita, das pragas e doenças, mas também o deus da cura e da proteção contra as forças malignas. Além disso era o deus da Beleza, da Perfeição, da Harmonia, do Equilíbrio e da Razão, o iniciador dos jovens no mundo dos adultos, estava ligado à Natureza, às ervas e aos rebanhos, e era protetor dos pastores, marinheiros e arqueiros. Embora tenha tido inúmeros amores, foi infeliz nesse terreno, mas teve vários filhos. Foi representado inúmeras vezes desde a Antiguidade até o presente, geralmente como um homem jovem, nu e imberbe, no auge de seu vigor, às vezes com um manto, um arco e uma aljava de flechas, ou uma lira, e com algum de seus animais simbólicos, como a serpente, o corvo ou o grifo."
Fonte:http://pt.wikipedia.org/wiki/Apolo
Já foi para a OBR com este nome, mas o projeto final receberá uma revisão na sua estrutura que se apresentou fraca em relação ao nosso padrão. Depois da queda dois dias antes da OBR (23/05), ainda se mostrou forte suficiente para entrar na arena e marcar nossos primeiros pontos na competição.
Dentro do plano de melhorias sofrerá estas alterações com data limite para 17/06.
08/05/2013
Depois de vários revezes na construção deste projeto, entramos numa fase crítica e o projeto inicial sofreu alterações. Apesar do chassi ainda não estar pronto já estamos trabalhando nas salas. Hoje desenvolvemos o programa para a sala 3 da OBR onde o robô deverá resgatar a vítima. No caso do Ensino Fundamental, basta o robô se aproximar da vítima e emitir um sinal sonoro e luminoso a 5 cm. Começamos programando a base do projeto conforme esquema abaixo:

http://www.youtube.com/watch?v=XD98Lw6efxo
http://www.youtube.com/watch?v=_i6zh1KxNh4
10/04/2013
Usando o esquema de sensor IR e, substituindo o fototransistor e o led emissor por um led de alto brilho (branco) e um LDR, desenvolvemos um sensor de linha que alcança cerca de 15 cm:

Vídeo do teste abaixo:
Além disso, concluímos a parte de elaboração e corrosão da placa de controle de motores conforme fotos abaixo, falta só soldar os componentes:


30/03/2013

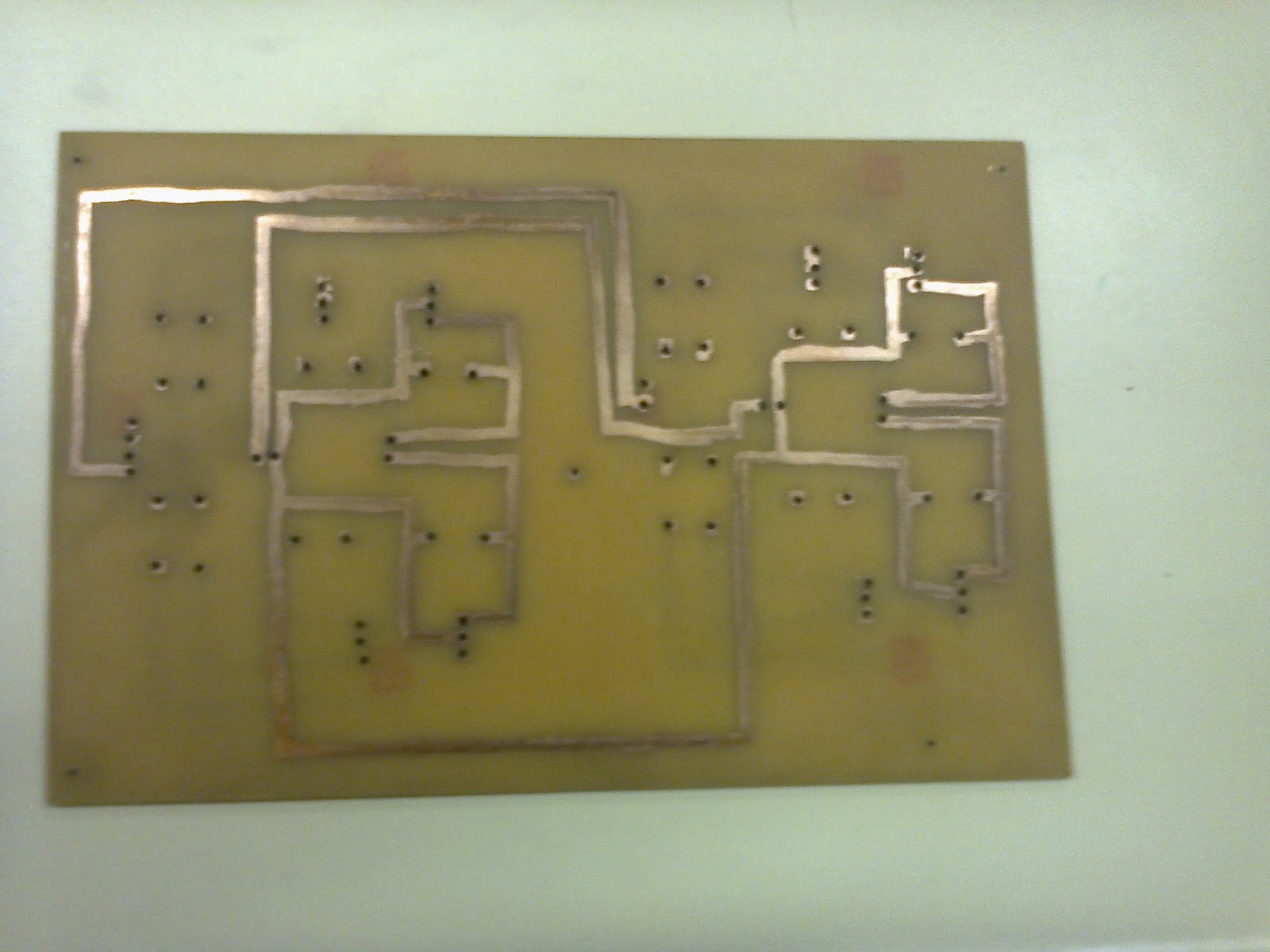
30/03/2013
Fizemos hoje a placa de circuito - ponte H dupla - para controle de 2 motores usando o TIP (110/115 ou 120/127).
https://skydrive.live.com/redir?resid=AC8ECA0DCFBBC517!427&authkey=!AATyvgnHh5cZ-_E

27/03/2013
Hoje terminamos a estrutura do robôs falta apenas terminar de instalar os motores. Desenvolvemos a ponte H na protoboard e já testamos em outro projeto (EMF1520) com bom resultado.
06/03/2013
Corte dos eixos com caixa de redução para os chassis.
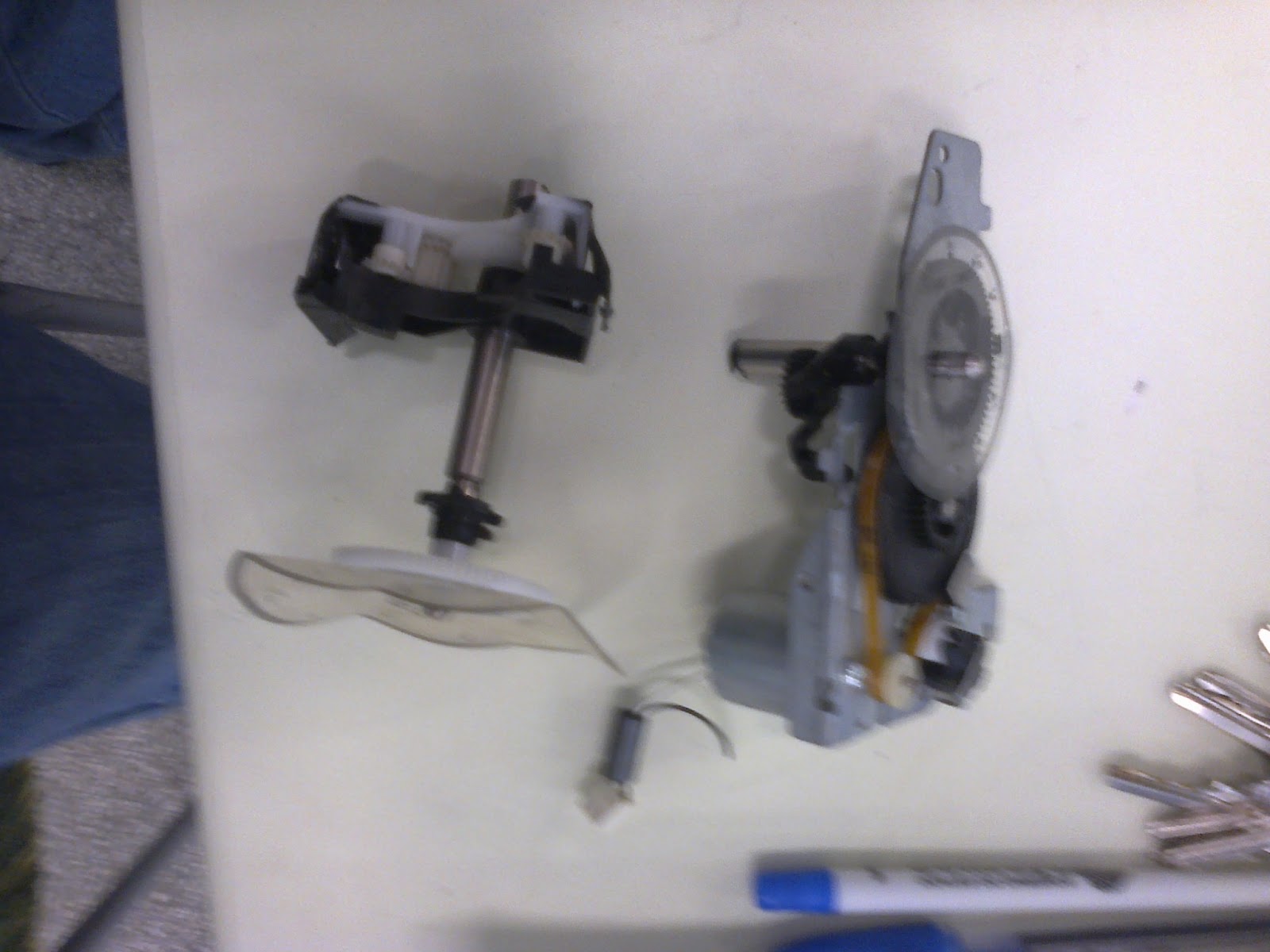
20/02/2013
Fotos das primeiras peças para montagem do robô: motor e caixa de redução e caixa da fonte ATX desmontada:




13/02/2013
Este projeto será desenvolvido pelo Jhonatan e pelo João Gabriel. Será um robô de 20x20 com sistema de tração independente dos lados (o eixo dianteiro será separado do eixo traseiro) e, com os motores que encontramos em impressoras, que já vem com redução, provavelmente será de esteiras, feitas de borracha de câmara de pneu de carro coladas com cola epoxi e vulcanizadas com ferro de passar roupa (ideia do Jhow). O chassi será feito de alumínio retirado de fontes ATX de computador, furadas as dimensões.
Ao Paulo caberá a responsabilidade de cortar os eixos. Um dos maiores desafios será fixar o motor no chassi e fazer a divisão do eixo dianteiro. Em breve postaremos a foto mas a ideia preliminar segue abaixo:

Em relação ao controle dos motores, utilizaremos uma ponte H construída inicialmente em protoboard, feita com TIP120 (NPN) e TIP122 (PNP), capaz de suportar correntes de até 6A, e tensões das mais varíáveis, provavelmente usaremos baterias de 11,1 V/1Ah, com taxa de descarga de 25C, conforme esquema abaixo:

Este projeto tem como objetivo um robô de resgate de alto risco e lutador de sumô. Quanto a sensores, provavelmente serão usados os TCRT 5000 (só usaremos os QRE1113 senão houver espaço) e um ou 2 sensores de ultrassom HC-SR04, dependendo de quantos tivermos na época.
Em breve as primeiras fotos do projeto...
Nenhum comentário:
Postar um comentário